









Laser sensors have become one of the core technologies for improving the efficiency and accuracy of warehouse automation in the auxiliary positioning of three-dimensional elevated warehouses, thanks to their high precision, non-contact measurement, and strong anti-interference capabilities. Its application runs through the entire process of goods storage, handling, and retrieval. The following will explain the specific application scenarios, technical principles, system architecture, and advantages:
1、 Core application scenarios
In the automated elevated warehouse, laser sensors are mainly used to assistStacker crane, shuttle car AGVWaiting for the device to achieve precise positioning, specific scenarios include:
1. Horizontal/vertical positioning of stacker crane
Horizontal direction: Install laser distance sensors (such as laser displacement sensors) on both sides of the shelf aisle or next to the stacker crane track to measure the distance between the stacker crane and the starting/ending point of the aisle in real time. Use encoder data to calibrate the position and ensure that the stacker crane accurately stops at the target cargo position (with an error controlled within ± 1mm).
Vertical direction: The height of the stacker crane lifting platform is measured by a laser sensor to assist in locating the position of goods on the vertical layer of the shelf, avoiding collisions or storage misalignment caused by mechanical transmission errors.
2. Goods location recognition and calibration
When the stacker crane grabs goods, the laser contour sensor (line laser sensor) can scan the outer contour of the goods, identify the offset of the goods on the pallet (such as left and right, front and back misalignment), and provide feedback to the control system to adjust the position of the robotic arm or fork to ensure smooth grabbing.
For irregular goods (such as irregular packages), laser sensors can reconstruct the shape of the goods through three-dimensional point cloud data, assisting the system in determining the optimal storage posture and position.
3. Shelf and location inspection
Lidar (multi line laser) is installed on the top or side of the stacker, which can scan the overall structure of the shelf, detect whether the cargo space is vacant, whether there are goods left or whether the shelf is deformed, and avoid storage errors caused by misjudgment of the cargo space status (such as repeated storage, empty retrieval).
During warehouse initialization or regular maintenance, laser sensors can quickly collect the three-dimensional coordinates of all storage locations, generate digital maps of shelves, and provide benchmark data for subsequent positioning.
4. AGV/Shuttle Vehicle Path Navigation and Parking
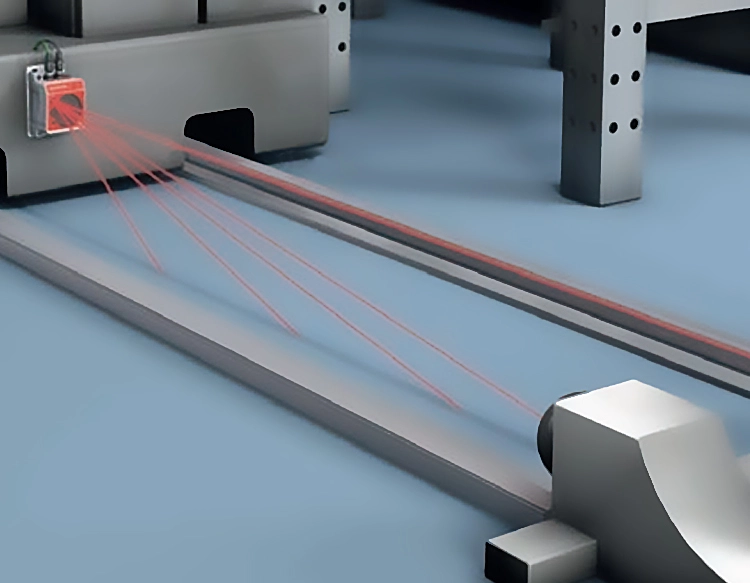
Laser guided AGV emits laser beams through top laser sensors, scans reflective plates (QR codes/reflective signs) on the ground or pillars, calculates the distance and angle between itself and the signs, and achieves centimeter level path tracking and station stopping (such as docking conveyors, entrances and exits).
When the shuttle car moves between shelves, the laser sensor can detect the distance to the shelf columns in real time, assist in correcting the direction of travel, and prevent collisions caused by track deviations.
2、 Technical principles and positioning methods
Laser sensors in three-dimensional elevated warehouses are mainly located through the following technologies:
1. Laser ranging (ToF/triangulation)
Time of Flight (ToF) methodSuitable for medium to long distance positioning (such as horizontal movement distance of stacker cranes and measurement of shelf height), distance data can be directly obtained by calculating the time difference between laser pulse emission and reflection back to the sensor (formula: distance=speed of light x time difference/2), with an accuracy of ± 5mm and a range coverage of 0.5-100 meters.
Triangulation methodSuitable for short distance high-precision positioning (such as cargo offset detection, AGV close range parking), the distance is calculated through the triangular geometric relationship between the reflection point of the laser on the surface of the object and the sensor receiving lens, with an accuracy of ± 0.1mm and a range of usually 0.1-1 meters.
2. Laser contour scanning
The line laser sensor emits a laser line to irradiate the surface of an object, and captures the deformation of the reflected light through a CMOS/CCD camera to generate object cross-sectional contour data (two-dimensional contour). Combined with the device's movement trajectory, it can be pieced into a three-dimensional point cloud for identifying the shape, size, and positional deviation of goods.
3. Laser navigation and reflector positioning
AGV or shuttle car emits laser to the surroundings through a laser emitter. When the laser encounters a preset reflector (high reflectivity material), the reflected light is captured by the receiver. By measuring the angles and distances of multiple reflectors and combining them with preset coordinates, the absolute position of the AGV in the warehouse coordinate system is calculated (similar to the GPS positioning principle).
3、 System Architecture and Workflow
The laser sensor assisted positioning system usually consists of the following parts, which work together to complete the positioning task:
1. hardware layer
Laser sensor: Select ToF sensor, triangulation sensor, line laser contour sensor or LiDAR according to the scene.
Execution equipment: stacker crane AGV、 Shuttle cars and other vehicles are equipped with sensors and drive modules.
Control system: PLC (Programmable Logic Controller) or industrial computer, receives sensor data and outputs control instructions.
Communication module: Data transmission between sensors and control systems is achieved through Ethernet, Wi Fi, or industrial buses (such as Profinet).
2. software layer
Data processing algorithm: Filter, denoise, and extract features from the raw data (distance, contour, point cloud) of laser sensors to eliminate interference from shelf pillars, dust, light, and other factors.
Positioning algorithm: Combining sensor data with device motion parameters (such as speed and acceleration), optimizing positioning results through Kalman filtering, particle filtering, and other algorithms to improve stability.
Visualization system: Real time display of positioning data, cargo location status, and equipment trajectory on the monitoring interface for easy monitoring by operators.
3. Typical workflow (taking stacker crane inventory as an example)
The control system receives inventory instructions and determines the target location coordinates (X: horizontal position, Y: floor height).
The stacker crane is started, and the horizontal laser sensor provides real-time feedback on the current position, which is compared with the target X coordinate to control the motor deceleration and precise stopping.
The vertical laser sensor measures the height of the lifting platform and adjusts it to the target Y layer. At the same time, the line laser sensor scans the cargo to confirm that the grasping position is not offset.
The fork extends and stores the goods in the storage location. The laser radar scans the storage location to confirm that it is in place (without protrusion or misalignment), completing the task.
4、 Advantages compared to traditional positioning methods
| locate mode | Advantages of laser sensors |
|---|---|
| Mechanical limit/encoder | Non contact measurement, no wear and tear; Real time calibration of mechanical errors with higher accuracy (± 1mm vs ± 5mm). |
| Infrared/Ultrasonic | Strong resistance to environmental interference (not affected by dust or warehouse lighting); The measurement distance is farther (100 meters vs 5 meters). |
| Visual camera | No need to rely on lighting conditions (stable operation in night/dim environments); Directly output distance data without the need for complex image algorithms. |
5、 Practical application precautions
1. Installation and calibrationLaser sensors need to be accurately fixed to avoid measurement deviations caused by vibration; Regularly calibrate the reference distance with the reflector/shelf to ensure consistency in the coordinate system.
2. environmental adaptationIn a multi dust warehouse, choose industrial grade sensors with dust covers; In high-temperature environments (such as food drying warehouses), it is necessary to ensure that the sensor's operating temperature range matches.
3. Data fusionCombined with encoders and visual sensors, the positioning reliability is further improved through multi-source data fusion (such as laser+visual dual verification of cargo position).
summarize
Laser sensors provide stable and reliable technical support for equipment positioning and cargo detection in three-dimensional elevated warehouses through high-precision distance measurement, 3D contour recognition, and anti-interference characteristics, significantly improving the efficiency, accuracy, and safety of warehouse automation. With the cost reduction and algorithm optimization of laser technology, its application in smart warehousing will further develop towards flexibility (adapting to multiple categories of goods) and intelligence (autonomous calibration and fault diagnosis).