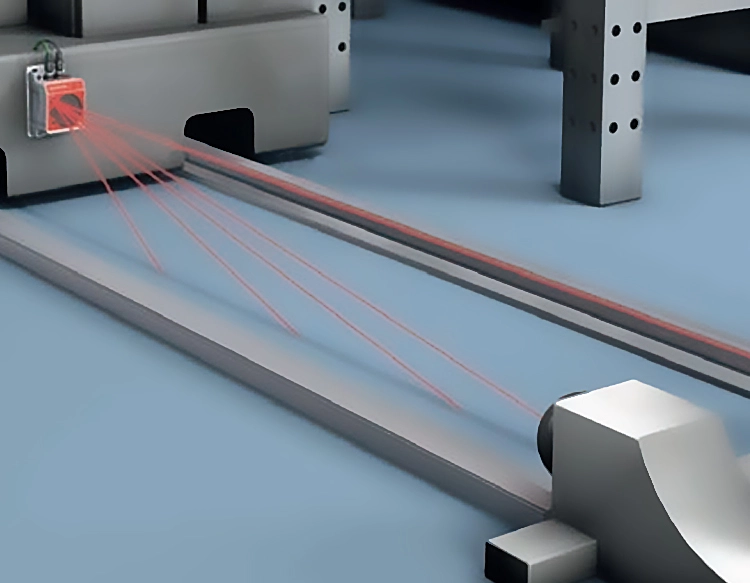
Line lidar, also known as linear scanning lidar, represents a specialized form of light detection and ranging technology. Unlike traditional multi-beam rotating lidar systems that capture 360-degree point clouds, line lidar emits laser pulses in a single-line or narrow planar pattern. This fundamental difference in scanning methodology defines its operational characteristics and application scope. The core working principle involves emitting rapid laser pulses along a fixed line, measuring the time-of-flight for reflected signals to calculate precise distances to objects intersecting that line. By mounting the sensor on a moving platform or integrating it with complementary scanning mechanisms, it can build up two-dimensional or limited three-dimensional environmental models over time.
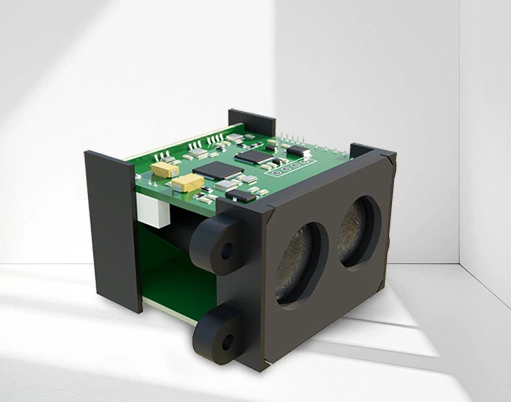
The architecture of a typical line lidar system comprises several key components. A laser diode generates coherent light pulses at specific wavelengths, commonly in the 905nm or 1550nm infrared spectrum for eye safety and atmospheric penetration. A collimating lens shapes the emitted light into a thin, fan-shaped beam. A highly sensitive photodetector, often an avalanche photodiode (APD) or single-photon avalanche diode (SPAD), captures the returning photons. Sophisticated timing circuitry with picosecond-resolution measures the interval between emission and detection. The processing unit then converts this raw time data into distance measurements, applying corrections for factors like ambient light and signal noise.
In autonomous driving systems, line lidar finds strategic deployment in specific functional modules. One primary application is forward collision warning and automatic emergency braking. A horizontally oriented line lidar mounted at vehicle front continuously scans the road ahead, detecting the distance to preceding vehicles or obstacles. Its high update rate and precise longitudinal distance measurement provide crucial input for predicting potential collisions. Another significant use is in adaptive cruise control systems, where it helps maintain a safe following distance by monitoring the relative speed and position of a target vehicle.
Lane detection and road boundary recognition represent another application domain. By analyzing the distance profile along the scanned line, algorithms can identify discontinuities corresponding to lane markings, curbs, or guardrails. This data supplements camera-based vision systems, particularly under challenging lighting conditions like low sun glare, tunnel entrances, or nighttime driving. Some advanced implementations use multiple line lidar units with different orientations to enhance perceptual coverage.
Compared to multi-beam spinning lidar, line lidar offers distinct advantages in certain automotive contexts. Its mechanical simplicity often translates to higher reliability, lower power consumption, and significantly reduced cost—critical factors for mass-market vehicle integration. The focused data output requires less computational power for processing, enabling real-time performance on embedded automotive processors. Furthermore, its compact form factor allows for seamless integration into vehicle body panels, headlight assemblies, or rearview mirror housings without disrupting aerodynamic design.
However, the technology presents inherent limitations. The single-line scanning pattern provides limited vertical field of view, making it less suitable for complete 3D environment mapping required for full autonomy. It may struggle with detecting objects outside its scanning plane, such as low-lying debris or overhead signs. Consequently, automotive engineers typically deploy line lidar as part of a sensor fusion ecosystem, combining it with cameras, short-range radar, and ultrasonic sensors to create redundant, robust perception systems.
Current industry trends show evolving implementations. Some manufacturers are developing solid-state line lidar using micro-electromechanical systems (MEMS) mirrors or optical phased arrays for completely non-rotating scanning. Others are exploring wavelength-division multiplexing to pack multiple scanning lines into a single optical channel. Integration with artificial intelligence enables predictive tracking of detected objects, anticipating trajectories beyond simple distance measurement.
The future development trajectory points toward higher resolution within the line scan, increased measurement ranges exceeding 300 meters, and enhanced performance in adverse weather conditions. Research focuses on improving signal processing to distinguish between rain/snow particles and solid obstacles. As automotive safety standards evolve and regulatory bodies like Euro NCAP assign higher ratings to vehicles with advanced driver-assistance features, the adoption of reliable, cost-effective sensing technologies like line lidar is poised for significant growth across vehicle segments, from premium models to mainstream economy cars.




 +40729977919
+40729977919  keysensor.ro@gmail.com
keysensor.ro@gmail.com