Accurate vehicle positioning is a cornerstone of modern transportation systems, enabling advancements in automation, safety, and logistics. Among the technologies driving this precision, the Vehicle Positioning Laser Rangefinder Sensor stands out for its exceptional accuracy and reliability. This sensor technology utilizes laser beams to measure distances with high precision, providing real-time data critical for various automotive and industrial applications.
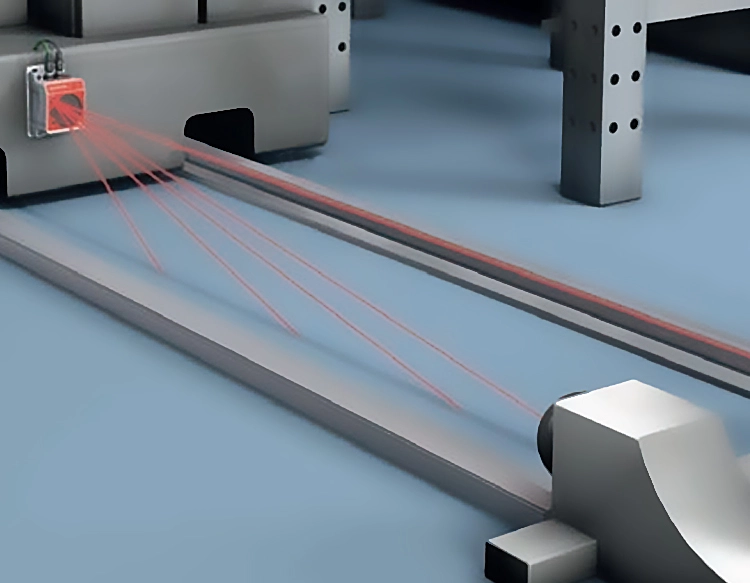
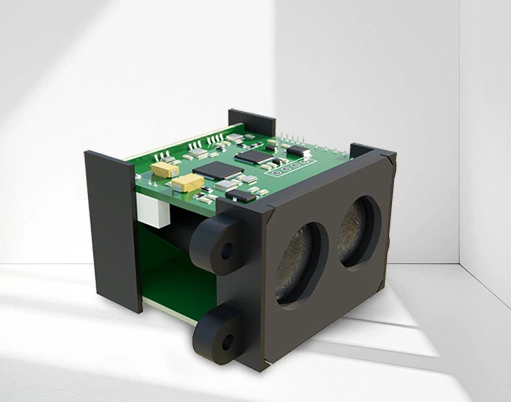
The core principle behind a laser rangefinder is LiDAR (Light Detection and Ranging) or time-of-flight measurement. The sensor emits a focused laser pulse towards a target, such as a road marker, another vehicle, or a structural element within a facility. The time it takes for the pulse to reflect back to the sensor is precisely measured. Since the speed of light is a known constant, the system can calculate the exact distance to the target with millimeter-level accuracy. This process occurs thousands of times per second, creating a detailed and dynamic point cloud map of the surrounding environment.
For autonomous vehicles, this sensor is indispensable. It forms a key part of the perception system, allowing the vehicle to understand its precise location within a lane, detect the proximity of obstacles, and navigate complex environments like intersections or parking garages. Unlike cameras, which can be hampered by poor lighting, or radar, which may offer lower spatial resolution, laser rangefinders provide consistent, high-fidelity data in most conditions, though very heavy rain or fog can present challenges.
Beyond self-driving cars, the applications are vast. In advanced driver-assistance systems (ADAS), these sensors contribute to features like adaptive cruise control, automatic emergency braking, and precise parking assistance. In industrial and commercial settings, they are used for automated guided vehicles (AGVs) and autonomous mobile robots (AMRs) within warehouses and factories. Here, the sensor ensures that vehicles can navigate narrow aisles, dock accurately at loading bays, and avoid collisions with infrastructure and personnel, optimizing workflow and safety.
The integration of this sensor data is crucial. It is typically fused with inputs from GPS, inertial measurement units (IMUs), and other sensors through sophisticated algorithms. This sensor fusion creates a robust and redundant positioning system. For instance, while GPS provides global coordinates, it can be inaccurate in urban canyons or tunnels. The laser rangefinder fills this gap by providing precise relative positioning, ensuring the vehicle always knows its exact location relative to its immediate surroundings.
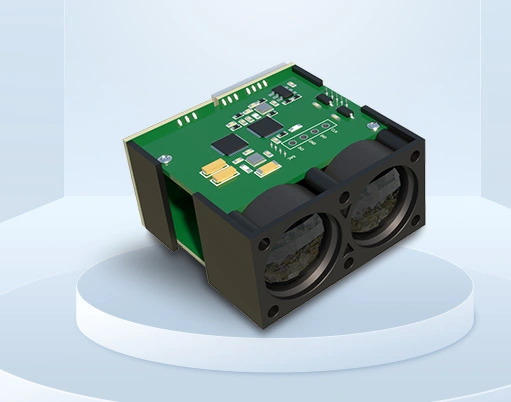
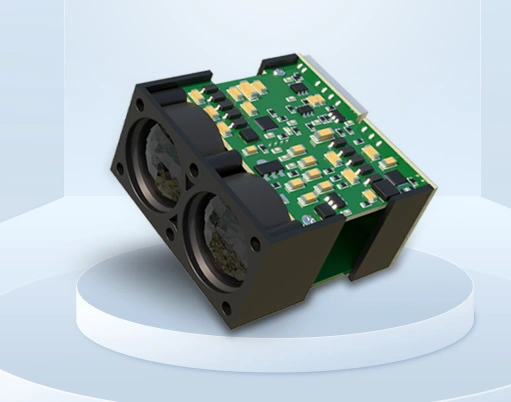
Deployment considerations are important. Engineers must account for factors like the sensor's field of view, range, scan rate, and resistance to environmental interference. Modern sensors are designed to be compact, durable, and energy-efficient, capable of withstanding the vibrations and temperature variations experienced in vehicular applications. The data output must also be in a format compatible with the vehicle's central computing platform for real-time processing.
The future of Vehicle Positioning Laser Rangefinder Sensors is tied to the evolution of smart cities and Industry 4.0. As infrastructure becomes more connected, these sensors will interact with intelligent transportation systems, communicating with traffic signals and other vehicles to enable smoother traffic flow and enhanced safety. Ongoing research focuses on reducing costs, improving performance in adverse weather, and increasing the resolution and range of the sensors.
In conclusion, the Vehicle Positioning Laser Rangefinder Sensor is a transformative technology that provides the high-precision, real-time spatial awareness essential for the next generation of automated transport and logistics. Its ability to deliver accurate distance measurements under diverse conditions makes it a critical component in the journey toward safer and more efficient mobility solutions. As technology progresses, its role will only become more central in shaping how vehicles perceive and interact with the world.




 +40729977919
+40729977919  keysensor.ro@gmail.com
keysensor.ro@gmail.com