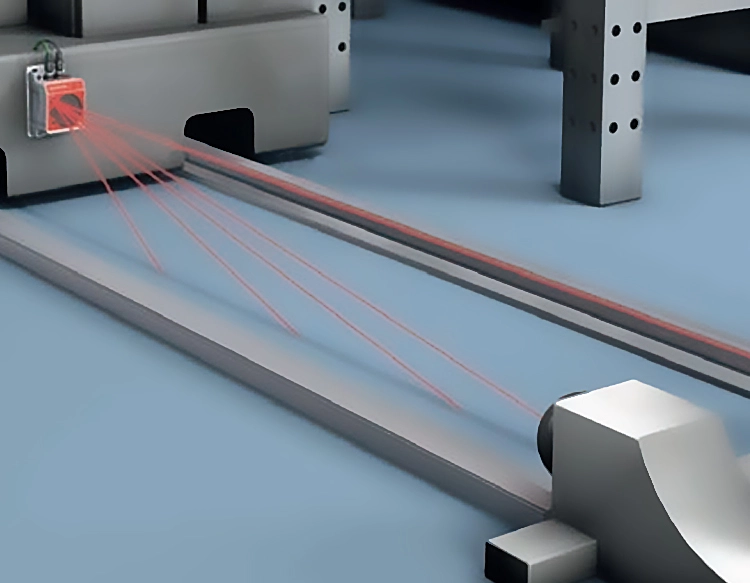
Laser rangefinder sensors have become indispensable tools across industries like robotics, surveying, and autonomous systems. Programming these sensors effectively requires understanding their core principles, communication protocols, and integration methods. This guide provides a practical overview for developers working with laser rangefinder sensors.
At its core, a laser rangefinder measures distance by emitting a laser pulse and calculating the time it takes for the reflection to return. This time-of-flight (ToF) principle forms the basis of most modern sensors. When programming, developers must first establish communication with the sensor, typically via serial interfaces like UART, I2C, or SPI. Each protocol has its own advantages: UART offers simplicity for point-to-point connections, I2C supports multiple devices on a bus, and SPI provides high-speed data transfer.
Initialization is a critical step. Most sensors require specific command sequences to start ranging operations. For example, sending a hexadecimal command like 0x01 might activate single-shot mode, while 0x02 could trigger continuous measurement. Developers should always refer to the sensor’s datasheet for exact command sets. Error handling during initialization is essential—checks for sensor readiness and response validation prevent runtime failures.
Data acquisition involves reading raw distance values from the sensor’s registers. These values are often in millimeters or centimeters and may require conversion based on the sensor’s output format. For instance, a 16-bit register might store distance as an integer representing centimeters. Programming logic must account for potential outliers; implementing software filters like moving averages or median filters can smooth noisy data.
Integration with larger systems adds complexity. In robotics, laser rangefinders often feed data into SLAM (Simultaneous Localization and Mapping) algorithms. Here, programming extends beyond basic distance reading to include coordinate transformation and data fusion with IMUs or encoders. Using libraries like ROS (Robot Operating System) can streamline this process, with pre-built nodes for common sensors.
Calibration is another key aspect. Sensors may have offset errors due to manufacturing tolerances or environmental factors. Programming a calibration routine involves measuring known distances and computing correction factors. For example, if a sensor consistently reads 5 mm too high at 1 meter, the code can apply a linear adjustment to all readings.
Advanced features like multi-echo detection allow sensors to distinguish between multiple surfaces in a single beam path. Programming these features requires parsing complex data packets. A sensor might return three distance values for one pulse—representing the nearest object, a secondary reflection, and noise. Developers must implement logic to identify valid targets based on signal strength thresholds.
Power management is crucial for battery-operated applications. Many sensors support sleep modes, reducing current draw when idle. Programming commands to switch between active and sleep states can extend device lifespan. For example, a sensor might consume 100 mA during ranging but only 10 µA in standby.
Testing and validation ensure reliability. Developers should create test suites that simulate real-world conditions, such as varying ambient light or temperature. Logging raw data and processed outputs helps identify edge cases—like measurements at maximum range or on highly reflective surfaces.
In summary, laser rangefinder sensor programming blends low-level hardware interaction with high-level data processing. By mastering communication protocols, implementing robust data handling, and integrating with system frameworks, developers can unlock the full potential of these precise measurement tools.




 +40729977919
+40729977919  keysensor.ro@gmail.com
keysensor.ro@gmail.com