Distance sensors are integral components in modern automation, robotics, and IoT systems, enabling precise non-contact measurement. The term "distance sensor range" refers to the minimum and maximum distances over which a sensor can reliably detect an object and provide accurate readings. This parameter is not merely a specification on a datasheet; it fundamentally dictates where and how a sensor can be effectively deployed.
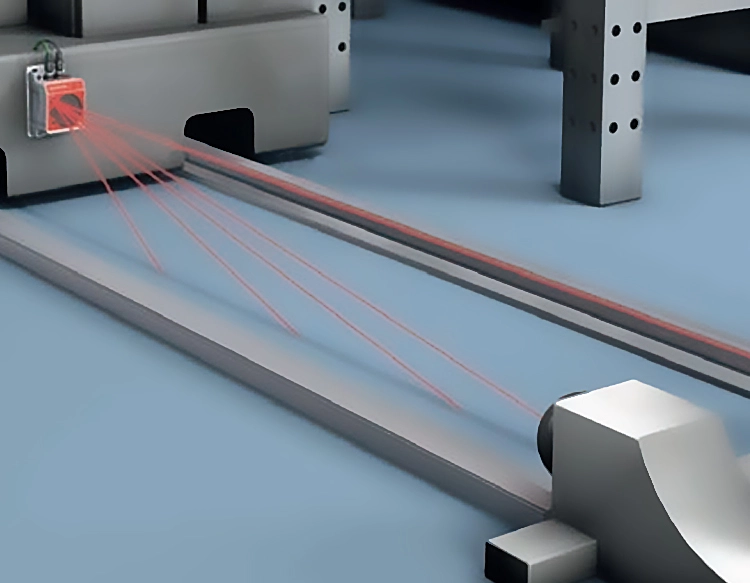
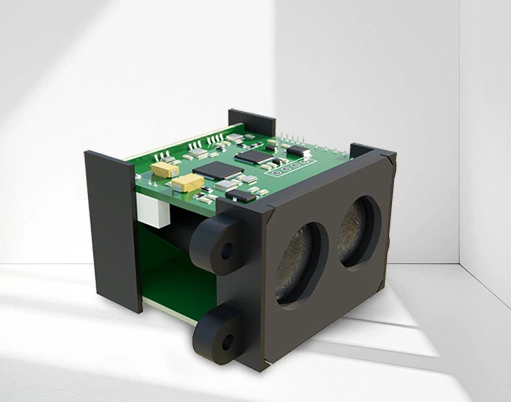
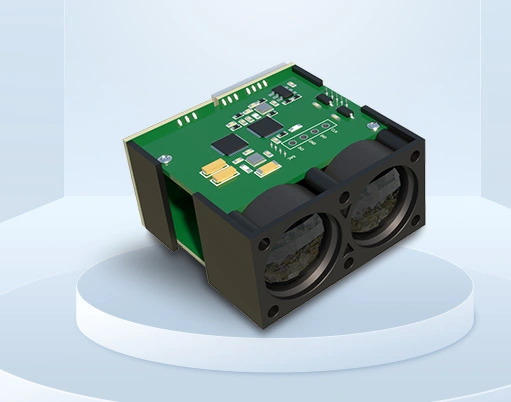
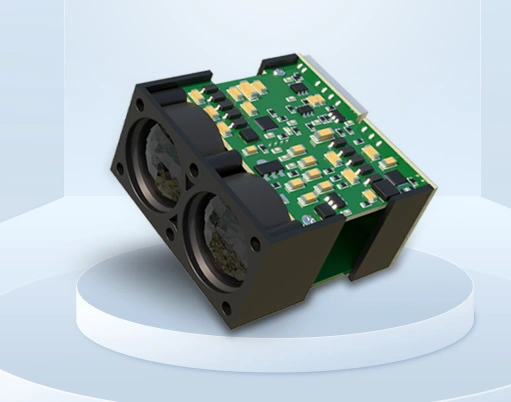
The operational range of a distance sensor is determined by its underlying technology. Common types include ultrasonic, infrared (IR), laser (LiDAR), and time-of-flight (ToF) sensors. Each has distinct range characteristics. Ultrasonic sensors, which use sound waves, typically offer ranges from a few centimeters up to several meters and perform well in varied environmental conditions, though they may struggle with soft, sound-absorbing materials. Infrared sensors often have shorter ranges, ideal for proximity detection, but their accuracy can be influenced by ambient light and the color of the target object. Laser-based sensors, such as LiDAR, provide the longest ranges and highest precision, capable of measuring over hundreds of meters, making them suitable for autonomous vehicles and topographical mapping.
Understanding the specified range is crucial for application success. Operating a sensor too close to an object, below its minimum range, can result in unreliable data or sensor saturation. Conversely, attempting to measure an object beyond the maximum range leads to signal loss or inaccurate readings. The "effective" range can also be narrower than the absolute maximum due to factors like reduced resolution at longer distances or increased susceptibility to interference.
Environmental factors significantly influence real-world sensor range. For outdoor applications, sunlight can overwhelm IR sensors, while rain or fog can scatter ultrasonic and laser signals. Dusty or smoky environments similarly attenuate signals. The target object's properties—its reflectivity, color, surface texture, and angle—are equally critical. A shiny, perpendicular surface reflects signals well, extending the effective range, whereas a dark, matte, or angled surface absorbs or deflects signals, reducing it.
Calibration and sensor settings are vital for optimizing performance within its range. Many sensors feature adjustable parameters like gain or output power, which can extend the usable range for specific targets at the potential cost of higher power consumption or reduced update rates. Regular calibration against known distances ensures sustained accuracy over time and temperature variations.
When selecting a distance sensor, engineers must consider the required range alongside other parameters like resolution, update speed, power requirements, and environmental robustness. For instance, a robotic vacuum cleaner may use a short-range IR sensor for cliff detection and a medium-range ultrasonic sensor for obstacle avoidance. An industrial forklift, however, might employ a long-range laser sensor for precise pallet positioning in a warehouse aisle.
In conclusion, the distance sensor range is a foundational specification that directly impacts system functionality and reliability. A thorough analysis of the application environment, target characteristics, and necessary precision is essential before selection. By matching the sensor's range capabilities to the specific task, developers can ensure robust, accurate, and efficient measurement systems, avoiding the common pitfalls of under- or over-specification that lead to project delays or failures. Proper integration and understanding turn this key parameter from a simple number into a guarantee of performance.




 +40729977919
+40729977919  keysensor.ro@gmail.com
keysensor.ro@gmail.com