


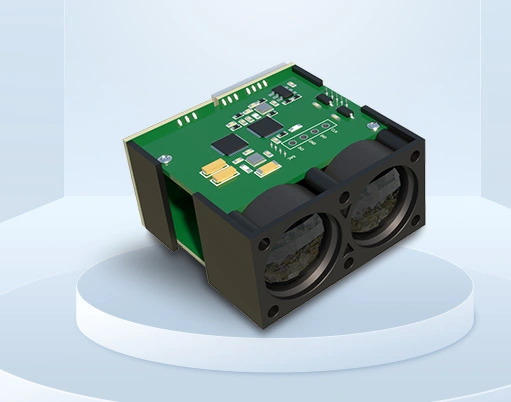

什么是激光雷达?
激光雷达(LiDAR,Light Detection and Ranging)是一种利用激光光束进行探测和测距的技术。与传统的雷达系统不同,激光雷达使用激光(而非无线电波)来获取物体的距离、速度和形状信息,广泛应用于地理测绘、自动驾驶、机器人导航、环境监测等领域。

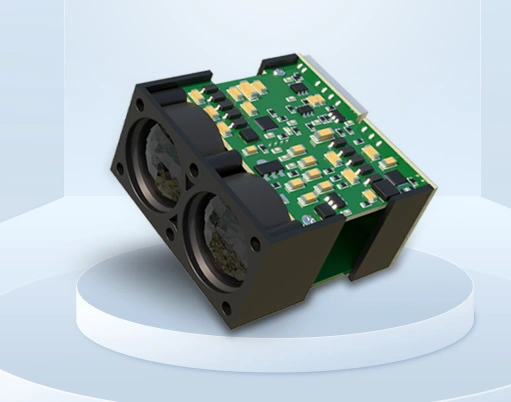
激光雷达的工作原理
激光雷达的工作原理基于激光的时间飞行(Time of Flight, ToF)或相位差技术,具体过程可以分为以下几个步骤:
激光发射:激光雷达通过一个激光发射器向目标区域发射短脉冲激光。激光束的波长通常在红外或可见光范围内,具有非常高的方向性和精度。
激光反射:激光束遇到物体或表面后会发生反射。根据物体的材质和表面特性,反射光的强度和散射角度可能会有所不同。
激光接收:激光雷达系统配有接收器,用来接收反射回来的激光信号。接收器通过测量反射光到达的时间差(或相位差)来计算光从发射器到物体表面的传播时间。
数据处理:系统根据反射信号的回波时间来计算光束的飞行时间,从而推算出激光到物体的距离。这个过程通常涉及到非常精确的时钟同步,以确保距离的准确测量。
三维成像与建模:激光雷达可以通过360度旋转、倾斜扫描等方式获取不同角度的信息,最终形成目标区域的三维点云图。每个点云数据都包含了物体的精确位置和反射强度,通常用于地形建模、物体识别、环境监测等。
激光雷达的应用
自动驾驶:激光雷达被广泛应用于自动驾驶汽车中,帮助车辆识别周围的物体、道路、障碍物等,以实现精准的定位与避障。
地理信息测绘(GIS):激光雷达被用于高精度的地形测量,尤其是在无法通过传统方法勘测的地区,如森林、山地等。
建筑与土木工程:用于建筑物的三维建模、道路规划、隧道勘察等。
环境监测:激光雷达可用于监测森林、海洋、城市建筑等环境变化。
总结
激光雷达作为一种高精度的测量技术,利用激光脉冲的时间飞行或相位变化来计算物体与传感器之间的距离,并生成精确的三维点云数据。它在自动驾驶、地理测绘、环境监测等领域有着广泛的应用,尤其在需要高精度距离测量和空间建模的场景中,激光雷达提供了比传统传感器更为精准的数据支持。







We and selected third parties collect personal information as specified in the privacy policy and use cookies or similar technologies for technical purposes and, with your consent, for other purposes as specified in the cookie policy.Use the “Accept” button to consent. Use the “Reject” button or close this notice to continue without accepting.